おはようございます!!
先日、こちら↓の記事を書かせていただきました。


スマートリモコンの学習キットの「sLab-Remo2」ですね!!

 キット構成 キット構成 |
 ArduinoIDE ArduinoIDE |
 ESP32と書込 ESP32と書込 |
 スケッチ書込 スケッチ書込 |
 ライブラリ等 ライブラリ等 |
 実習①Lチカ 実習①Lチカ |
 実習②照度センサ 実習②照度センサ |
 実習③温湿度センサ 実習③温湿度センサ |
【電子部品利用実習③編】ということで実際に回路を組み、プログラムを転送し、温湿度センサの動作確認まで行いました。
 ※ 右下のはSwicthBotの温湿度センサー
※ 右下のはSwicthBotの温湿度センサーで比較用です。
温度と湿度が変わると後ろに流れていく数値が変化するんですね。
・・・で、今回は(盆休みで家族が多くて1週飛んじゃいましたが)電子部品利用実習④編で人感センサで実習します!!
目次
スマートリモコン「sLab-Remo2」(エスラボリモ2)【Scratch・Arduino対応】環境センサ・カメラ付《IoT電子工作・AI学習・プログラミング》
こちらです!
詳しい話は以前の記事↓へ!!


4,290円でこれだけ遊べたら凄いものです。(・・・と奧さんに言われています)
ちなみに、本キットの心臓部ESP32-DevKitCですが、Amazonさんで1,500円ぐらいで普通に買えますね。

Espressif社純正 ESP-WROOM-32D開発ボード ESP32-DevKitC-32D
壊してしまったら一大事!と思ってましたが・・・昼ごはん1回我慢すれば買えます(泣)
 昼ご飯は1コイン以下ちゃうのん? 見栄はったらあかんよ!!
昼ご飯は1コイン以下ちゃうのん? 見栄はったらあかんよ!!
では、スタートします。

sLab-Remo2【電子部品利用実習④編】
公式メニューの電子部品利用に入ります!(こちら)

下にもズラズラ~っと並んでいますが、まずは 環境センサ付きリモコンを作るわけですね!!
【環境センサ付スマートリモコンで利用】
2-1-1.LED点滅
2-1-2.照度センサ
2-1-3.温湿度センサ
2-1-4.人感センサ
2-1-5.赤外線リモコン受信
2-1-6.赤外線リモコン送信
これで本キットの目的はほぼ達成かも?・・・いやいや、もったいないですね。
それから応用としてその他のデバイス紹介と実習。
【電子部品の使い方のみ】
2-2-1.超音波センサ
2-2-2.赤外線障害物センサ
なんとなく、同社のSLab-Carキットに使われる部品のような・・・

sLab-Car(エスラボ・カー)スマートロボットカー【Scratch・Arduino対応】スターターキット《IoT電子工作・AI学習・プログラミング》 (最小)
いやいや、これらの部品もスマートリモコンに応用できるハズ!!です。
最後にカメラ付きスマートリモコン!!
【カメラ付スマートリモコンで利用】
2-3-1.カメラ
これどのように使うのでしょうね?(笑)
カメラで顔を認識して赤外線リモコンで何かを動かすとか??・・・できればいいですね!!
・・・で、本日は電子部品利用実習④編として、4番目の人感センサをやってみたいと思います。Amazon Echo Flex用のモーションセンサー↓と同じですね!!

モーションセンサーでググると加速度センサーを使ったようなものもヒットするのですが、ここでは赤外線測定で人の動き(人感)を判断するものですね。
こちらに同じようなデバイスのことが書かれています。
人の動きを判断するので、防犯センサーなどでよく使われますね!

人感センサ
こちらですね。

前々回の照度センサはが光にアナログ電圧になりCPUモジュールの電圧計で測定しました。
前回は温湿度センサー内でデジタルに変換した数値をCPUモジュールで読み込みました。
今回は人感センサーでの反応をハイ・ローで判定するみたいですね。
 それはハイタッチ
それはハイタッチ
電気回路と電子工作
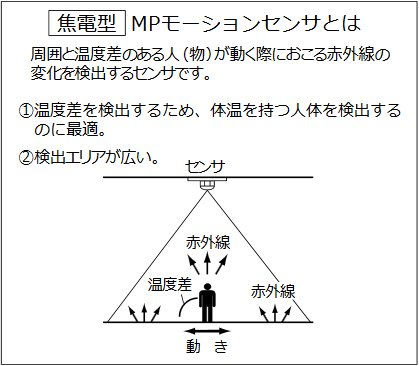
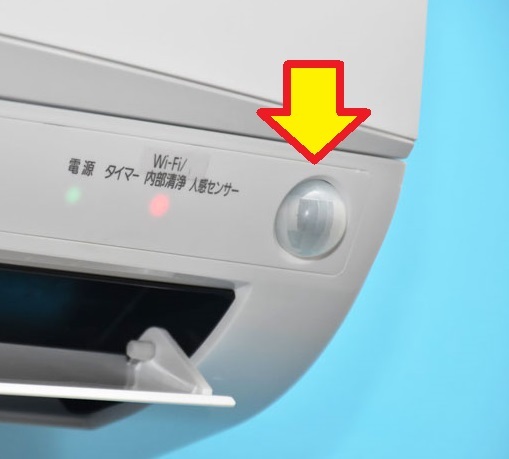
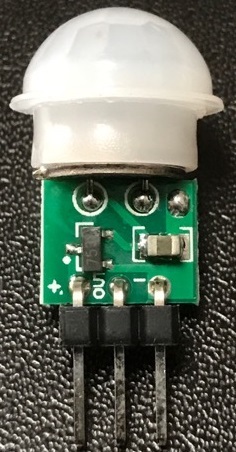
今回使うのは焦電型赤外線センサ(※ 型番不明)ですね。
 クラゲみたいな形ですが、トップにあるドームはエアコンなどでよく見かけますね!
クラゲみたいな形ですが、トップにあるドームはエアコンなどでよく見かけますね!
ピンは3本あり、電源、GND以外にVOUTという出力ピンがあるだけですね。
・・・で、回路図がこちらです!!
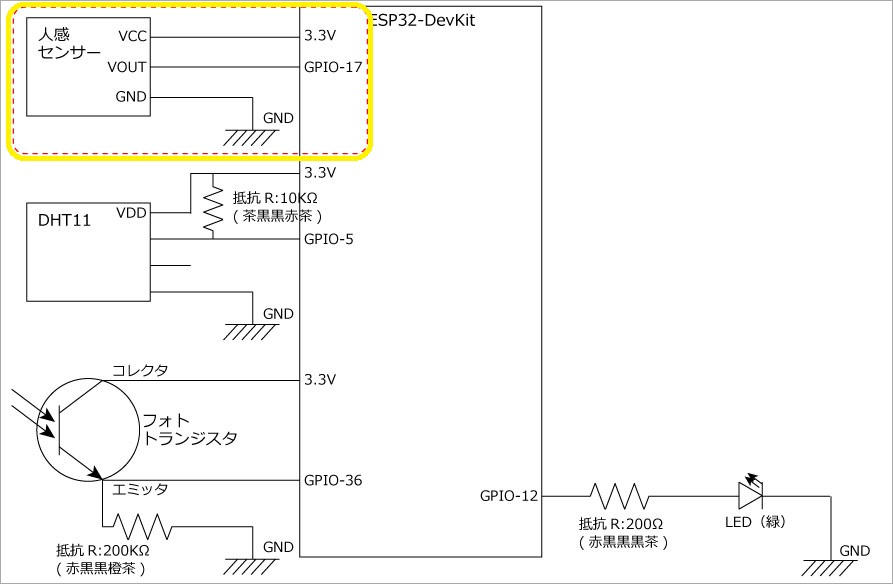
過去3回で組み立てた分も載ってますので、今回は左上の黄枠の部分です。
人感センサのVOUTはGPIOー17に接続され、CPUでハイロー判定するみたいですね。
判定基準は・・・こちらに詳しく書かれていました!!(感謝!!)
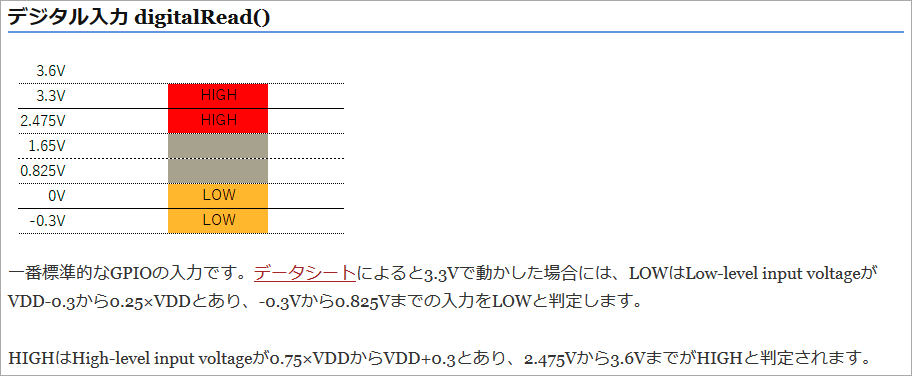
これらの電圧範囲で判定されるんですね~
ポイントは、
- 人感センサーはピンに注意!(部品が乗ってる面の左からVCC,VOUT,GND)
- GPIO-17はデジタルの入出力端子として使う!
今回も配線が少なくて楽そう~!!

回路図だけでは動かないので、実際に部品を繋いでいく必要があります。
こちらの実装図を確認ですね。(今回の部分をオレンジで囲んでいます。)

ちょっとこれもポイントを書いてみます。
- 人感センサーは部品面を手前(CPUと反対)へ!
- 左ピン(電源)のラインは配線流用でそのままでOK!
- 中央ピン(VOUT)からGPIO17(TX2の標印)のラインは
黄色い線で結線する! - 右ピン(GND)のラインは一旦右に出して
温湿度センサーのGNDへ黒い線で結線する!
過去の配線流用のところが危なっかしいですね。
あとは下に小さい字で書かれていますが、Lチカ回路でやったことそのままの状態でOKですね。
実験回路の組み立て
前回の最終形状は・・・

ちょっと細々と辛くなってきましたが、ここに追加で実装します。
部品探しは、人感センサーのみですね。
(※ ここから先は、左に入っていた袋で、右が部品の画像です)
 |
 |
 |
本体の画像が2枚あります。ちょっとピン配置の標印が紛らわしいんです。
中央の写真の向きでは、左から「+」「OUT」「-」で、
右の写真の向きでは、左から「VIN」「OUT」「GND」ですね。
公式にあった写真と一致するのは中央の写真ですね。
コネクタが上から下に刺さってる方向が表と考えると間違えないと思います。
・・・で、これらを実装と・・・配線が中途半端なので切って調整しました。
色も黒が無かったので灰色ですね。
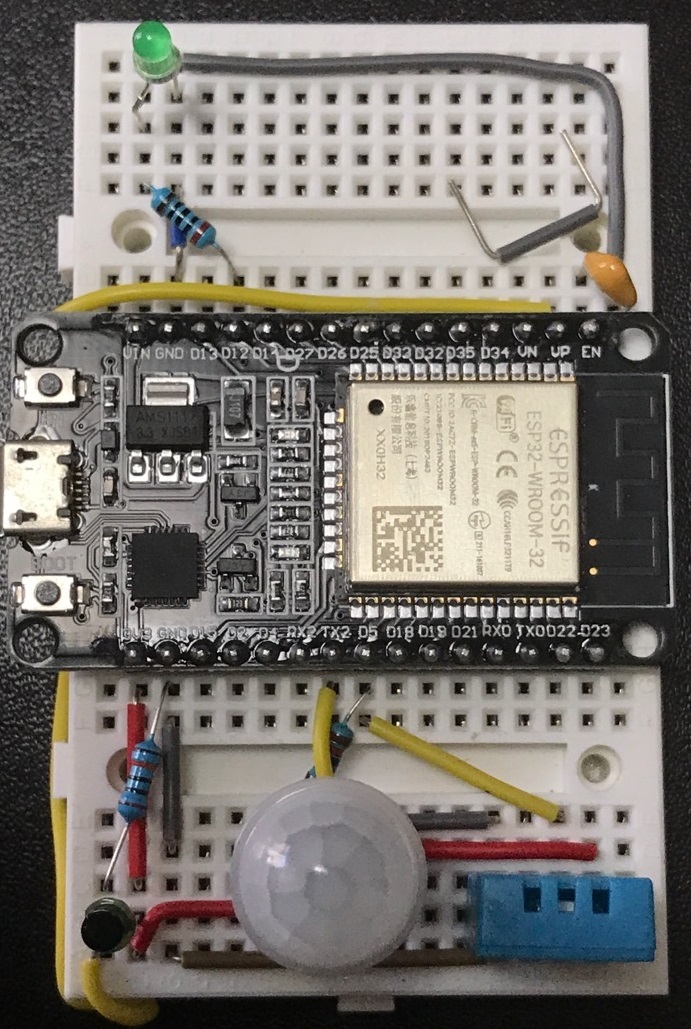 ※ 右上に配線が転がっていますが、幸い動作前に気づいて取り除きました(汗)
※ 右上に配線が転がっていますが、幸い動作前に気づいて取り除きました(汗)
どうしても配線が隠れちゃいますね。
では、センサー部分を上の写真の下側から見た画像です。
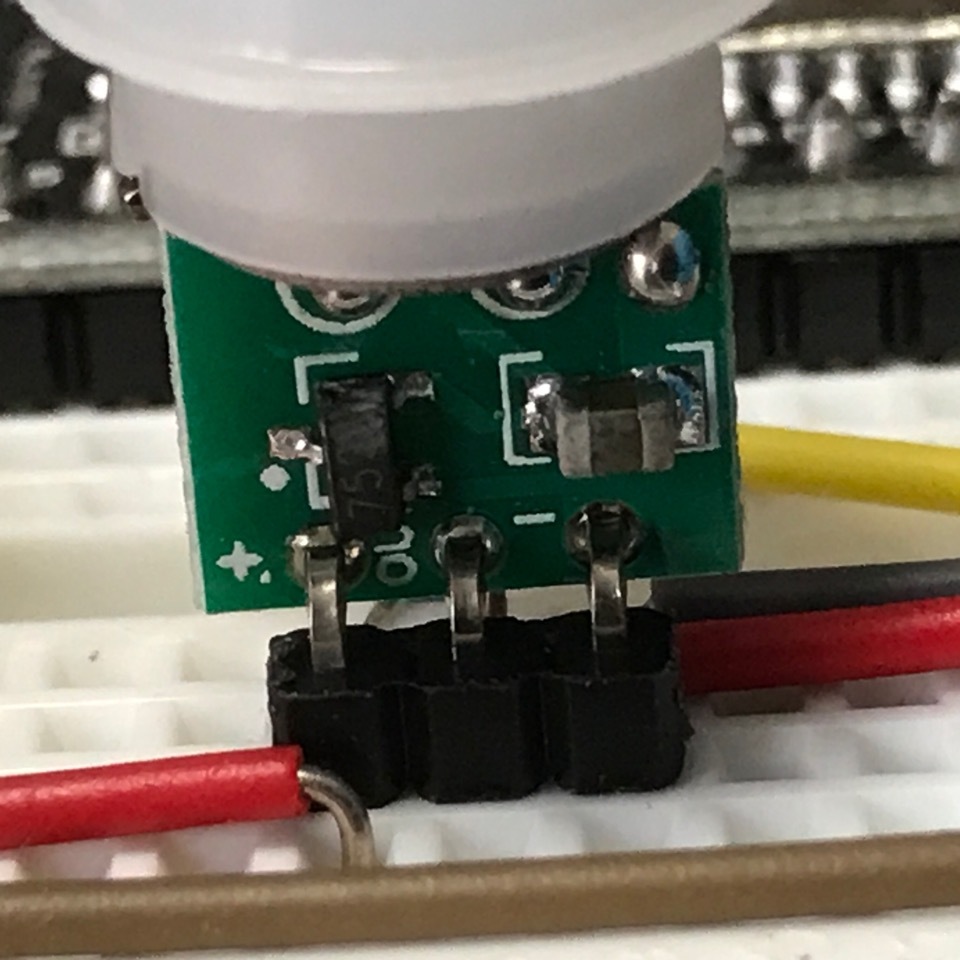
これで完成です。
これで実験回路はできあがりで、書き込めば動く・・・はず!!

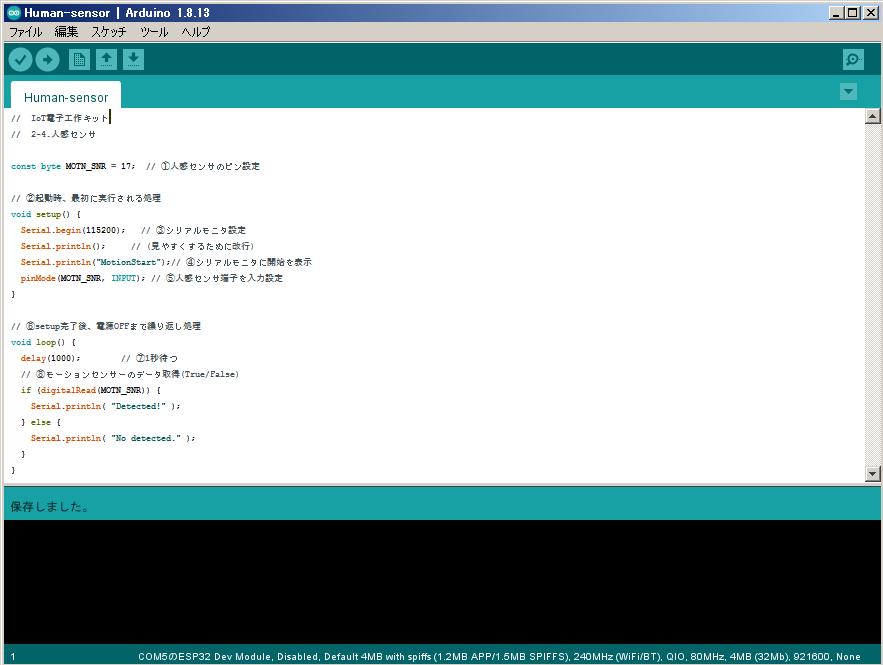
スケッチ(制御ソフトウェア)
Arduino IDEの登場です!!・・・あ~大変だ。
これでプログラムミングしないと回路が動かないわけですね。
スケッチを作成!!
今回も前回作ったArduinoフォルダの中のsLab-Remo2フォルダのTemp-humid-sensorを「Human-sensor」と名前をつけて保存してから、サンプルスケッチを貼り付けて保存してみます。(※ 手順の画像はこれまでと同様なので端折ります)
よしよし!これで動くはず・・・って、まだ複製して貼り付けただけですね!!
スケッチの中身
公式にかなり丁寧に解説してありますね。でも、自分なりに加筆してみます。

これまでは何らかの方法で値が返ってきましたが、今回はdigitalRead(ピン番号)で判定結果が返ってくるので、分岐させて表示内容を変えてるんですね。
この辺で、GPIOの使い方をまとめておいた方が良さそうです。
ハラハラドキドキ!動作確認!!
ハラハラドキドキですね。
ボードにUSBケーブルを繋いでノートパソコンに接続、そして、プログラムを開きました。ボードへの書込は、忘れずにこの技↓ですね!!(※ 該当の部分に飛びます)
(※ 後半の「書き始めるまでBOOTボタン押しっぱなし技」です。)


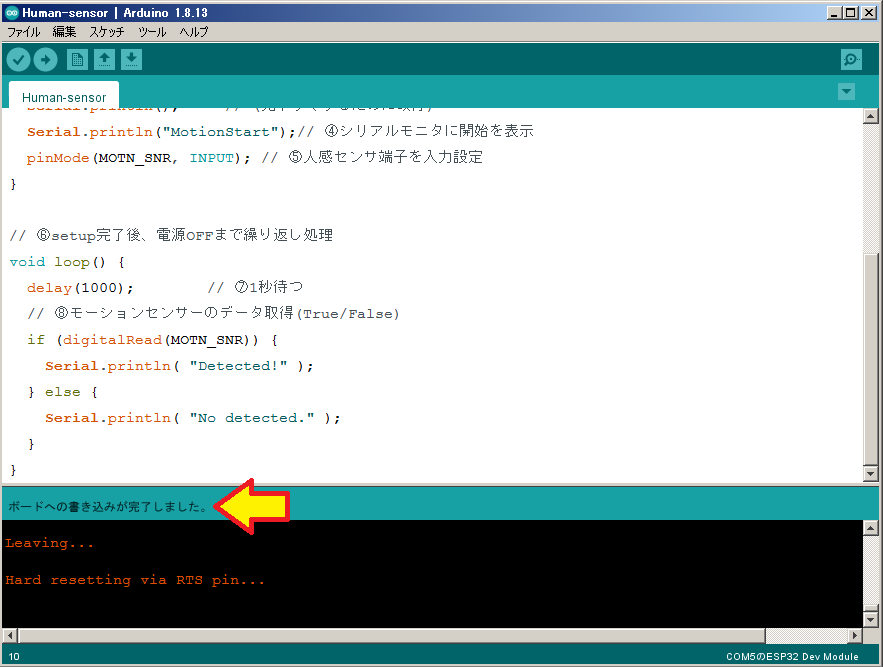
今回は1回失敗しました!(泣)
でも、2度目で成功しました!!
ハラハラドキドキは変わりませんね。
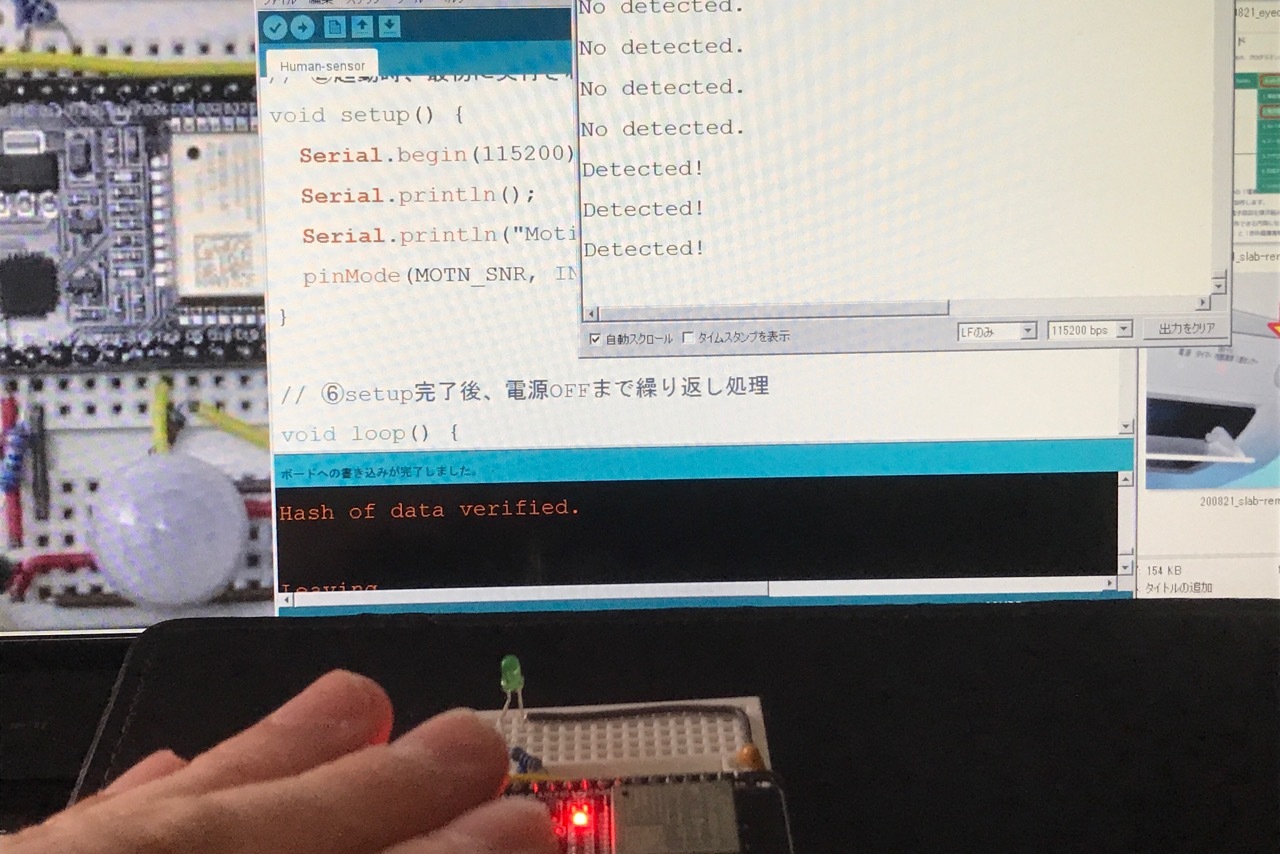
さて、どうなるか・・・はい!!
 ※ ブログ記事と同時進行で実験しています。
※ ブログ記事と同時進行で実験しています。
動きました!!(※ 今日はさすがにエアコンつけてます。外気温37度では死にます(泣))
 ※ sLabダンサーズ(仮称)
※ sLabダンサーズ(仮称)
1秒ごとに表示が変化しています。ちょっと遅延がありますね。
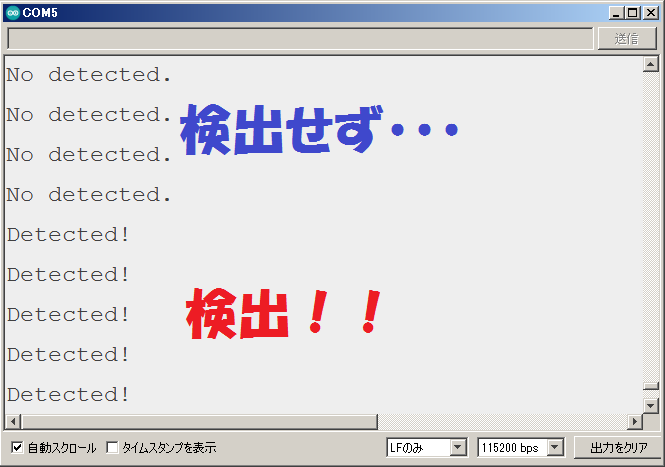
こんな感じです。
Echo Flexのモーションセンサーと比べると、動作状態がわかりやすいですね!!
 もう少し勉強しなくては!!
もう少し勉強しなくては!!
まとめ
今回はラクチンでした。
次回は【電子部品利用実習⑤編】ですね。
いよいよ赤外線リモコン受信です。

今まで肉眼では見えなかった赤外線リモコンのデータが見えるようになるんですね!
これは楽しみです!!

以上です!!
ようやく、次回からはスマートスピーカーのブログらしくなってきますね。
よかったよかった。
でも、実験ボードの密度が高くなってきましたので、そろそろどこか壊れてきそうで恐いです。キチンと固定した方がいいかもしれませんね。
(おわり)