おはようございます!!
先日、こちら↓の記事を書かせていただきました。


スマートリモコンの学習キットの「sLab-Remo2」ですね!!

 キット構成 キット構成 |
 ArduinoIDE ArduinoIDE |
 ESP32と書込 ESP32と書込 |
 スケッチ書込 スケッチ書込 |
 ライブラリ等 ライブラリ等 |
 実習①Lチカ 実習①Lチカ |
 実習②照度センサ 実習②照度センサ |
 実習③温湿度センサ 実習③温湿度センサ |
 実習④人感センサ 実習④人感センサ |
 実習⑤赤外線 実習⑤赤外線リモコン受信 |
 実習⑥赤外線 実習⑥赤外線リモコン送信 |
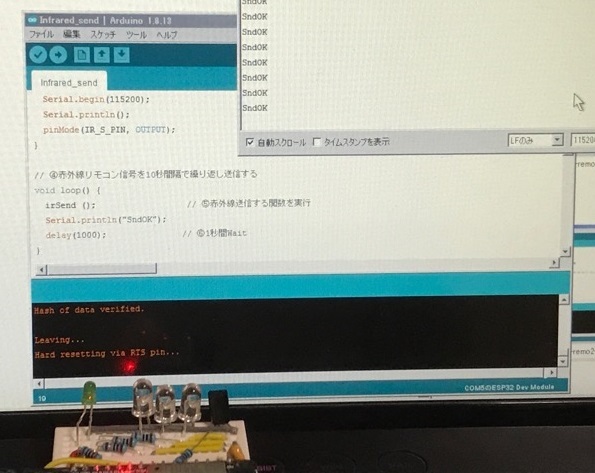
【電子部品利用実習⑥編】ということで実際に回路を組み、プログラムを転送し、赤外線リモコンの送信動作確認まで行いました。
1個1個部品を乗せていったものが動いて、最終的にTVが点くって感動ですよね!!

・・・で、今回は電子部品利用実習⑦編で超音波センサを学習しました!!
(’20 9/24 )
表題のタイトルが間違っていた(前回のまま)だったので訂正させていただきました。

目次
スマートリモコン「sLab-Remo2」(エスラボリモ2)【Scratch・Arduino対応】環境センサ・カメラ付《IoT電子工作・AI学習・プログラミング》
こちらです!
詳しい話は以前の記事↓へ!!


4,290円でこれだけ遊べたら凄いものです。(・・・と奧さんに言われています)
ちなみに、本キットの心臓部ESP32-DevKitCですが、Amazonさんで1,500円ぐらいで普通に買えますね。

Espressif社純正 ESP-WROOM-32D開発ボード ESP32-DevKitC-32D
壊してしまったら一大事!と思ってましたが・・・昼ごはん1回我慢すれば買えます(泣)
 昼ご飯は1コイン以下ちゃうのん? 見栄はったらあかんよ!!
昼ご飯は1コイン以下ちゃうのん? 見栄はったらあかんよ!!
では、スタートします。

sLab-Remo2【電子部品利用実習⑦編】
公式メニューの電子部品利用に入ります!(こちら)

下にもズラズラ~っと並んでいますが、まずは 環境センサ付きリモコンを作るわけですね!!
【環境センサ付スマートリモコンで利用】
2-1-1.LED点滅
2-1-2.照度センサ
2-1-3.温湿度センサ
2-1-4.人感センサ
2-1-5.赤外線リモコン受信
2-1-6.赤外線リモコン送信
これで本キットの目的はほぼ達成かも?・・・いやいや、もったいないですね。
それから応用としてその他のデバイス紹介と実習。
【電子部品の使い方のみ】
2-2-1.超音波センサ
2-2-2.赤外線障害物センサ
なんとなく、同社のSLab-Carキットに使われる部品のような・・・

sLab-Car(エスラボ・カー)スマートロボットカー【Scratch・Arduino対応】スターターキット《IoT電子工作・AI学習・プログラミング》 (最小)
いやいや、これらの部品もスマートリモコンに応用できるハズ!!です。
最後にカメラ付きスマートリモコン!!
【カメラ付スマートリモコンで利用】
2-3-1.カメラ
これどのように使うのでしょうね?(笑)
カメラで顔を認識して赤外線リモコンで何かを動かすとか??・・・できればいいですね!!
・・・で、本日は電子部品利用実習⑦編として、7番目の超音波センサをやってみます。コウモリが出すような超音波で距離を測るんですね!!

赤外線リモコン送信
こちらですね。

これまでのところとちょっと違うのが・・・
本センサは超音波センサ個別の電子工作学習用です。sLab-Remo2ではリモコンと合わせた電子工作として利用する手順は用意しておりません。
あくまでも番外編なんですね!
一見、スマートリモコンとは無縁なセンサーですが、しっかり理解して後は自分で組み合わせばOKですね!!

電気回路と電子工作
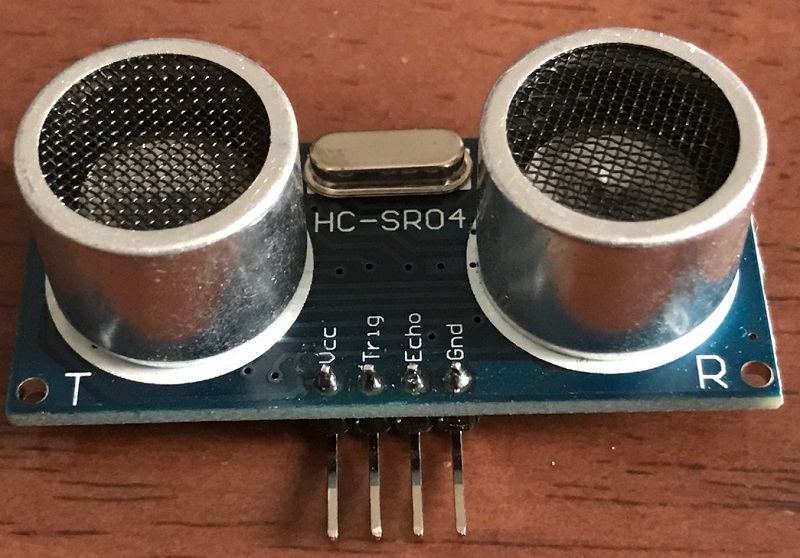
今回使うのは超音波センサですね。

おそらく、CPUボードを除けば今回のキットでは一番大きな部品ですね。
「静電気って何のこと??」っていうぐらい裸で入っていて頑丈なのでしょうかね?

あっ!端子の名前は左から「Vcc」「Trig」「Echo」「Gmd」ですね。
なんとなく、Trigをゴソゴソしたら、Echoから何か出てきそうです(笑)
ググってみたら、HCSR04という部品みたいです。(こちら)
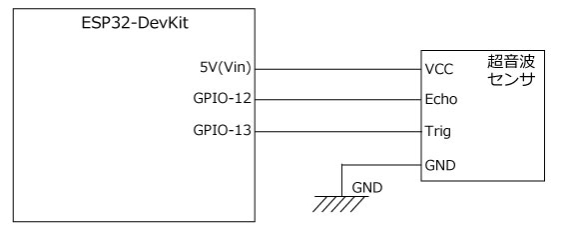
・・・で、回路図がこちらです!!
まるまる新規ですね!!かなり酷い状態になってましたから新鮮です!!
ブレッドボードは余ってるので、CPUボードだけ移動させて流用しますか・・・
(予備買っておけばよかった・・・)
回路図だけでは動かないので、実際に部品を繋いでいく必要があります。
こちらの実装図を確認ですね。
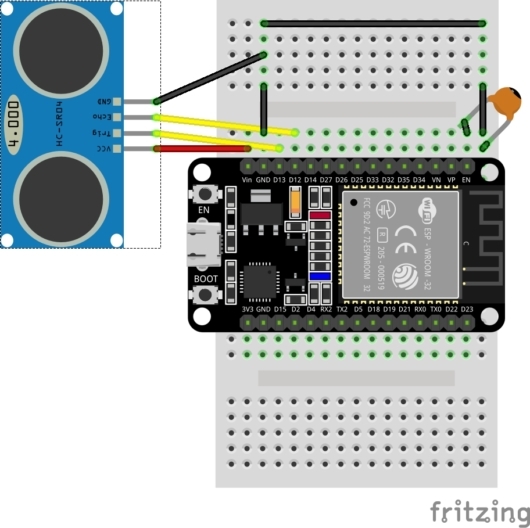 センサーが中に浮いてますね。
センサーが中に浮いてますね。
このままでは扱いづらいので、一旦ボードに差してから配線したいと思います。
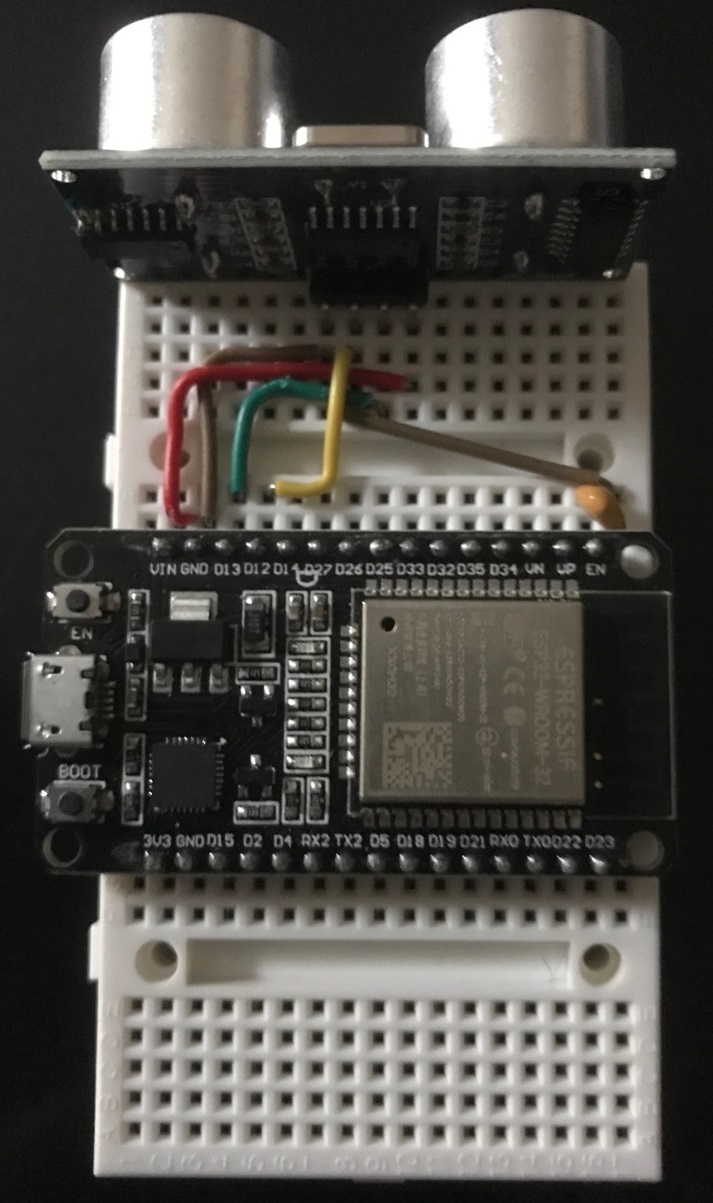
先にpinアサインを再確認してみます。
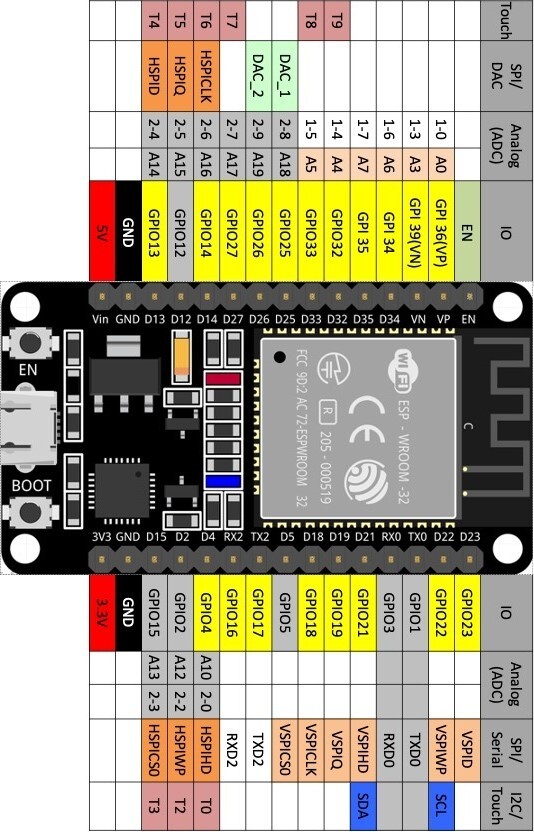
ああ~、左上の4つのpinで基本的に完結するんですね!(※ リセットの為のEN端子の処理以外)
ちょっとポイントを書いてみます。
- Vin(5V)をセンサーの1pinへ!
- GNDをセンサーの4pinへ!(※ さらにリセット回路へ)
- GPIO13をセンサーのTrigへ!!
- GPIO12をセンサーのEchoへ!!
- 忘れないように、右端のリセット回路を組むこと!!
リセット回路はLチカ回路でやったことを思い出して同じようにですね。(こちら)
実験回路の組み立て
部品探しは、超音波センサだけですね。
裸で入ってましたので、すぐに見つかりました!!
信号名も書かれてますので、文句はありません。
一気に組んでみました!!!
これで完成です・・・配置はやりやすいように別ものに変えました!!(笑)
ちなみに、CPUボードを取り去れた方のボードは・・・
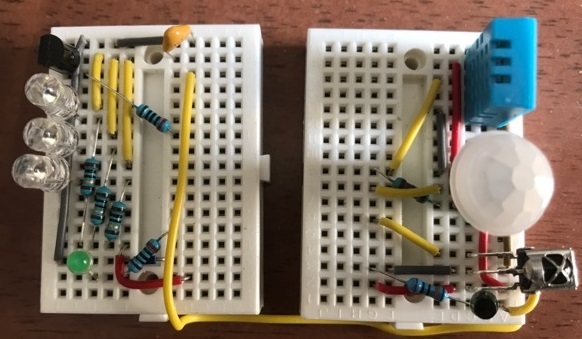 涙
涙
これで実験回路はできあがりで、書き込めば動く・・・はず!!

スケッチ(制御ソフトウェア)
Arduino IDEの登場です!!・・・あ~大変だ。
これでプログラミングしないと回路が動かないわけですね。
スケッチを作成!!
今回も前回作ったArduinoフォルダの中のsLab-Remo2フォルダのInfrared-sendを「Ultrasonic-sensor」と名前をつけて保存してから、サンプルスケッチを貼り付けて保存してみます。(※ 手順の画像はこれまでと同様なので端折ります)
あれ?今回は公式のものとファイル名がかち合っちゃいましたので「Ultrasonic-sensor2」にしました。

よしよし!これで動くはず・・・
スケッチの中身
公式にかなり丁寧に解説してありますね。とりあえず貼り付けます。
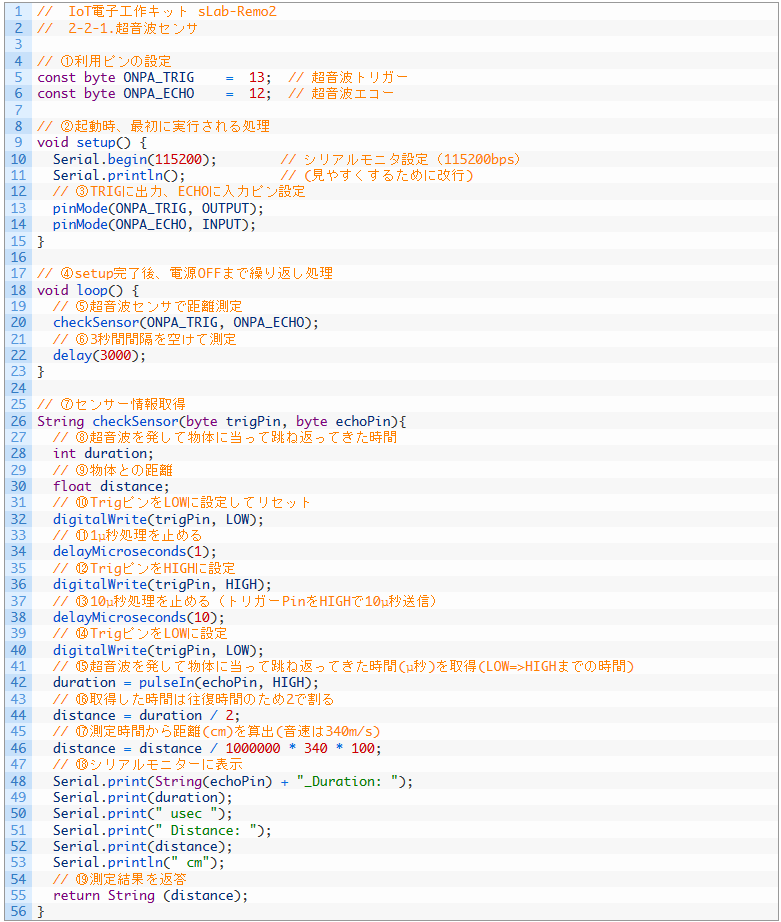
今回は、重要なcheckSensor()だけフローチャートにしてみました。
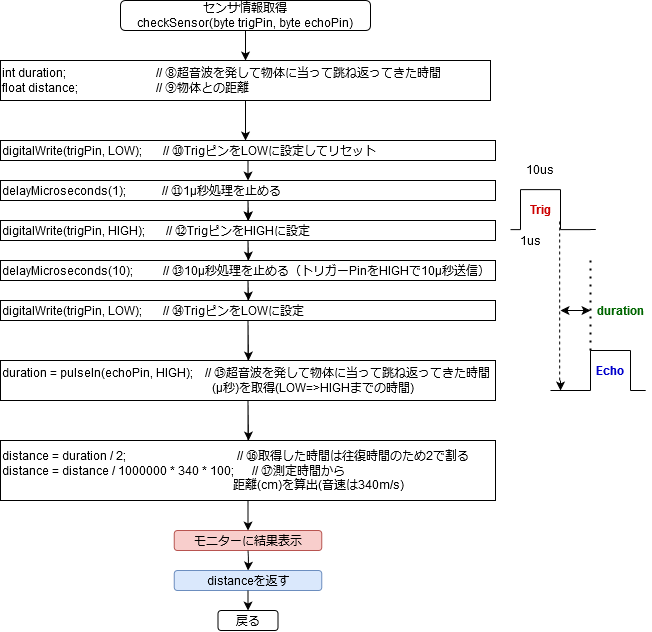
プログラムと解説を見比べながら、ツール(こちら)を使って作りました。
3秒間隔で10usのパルスをTrigerに送って、Echoが立ち上がるまでの時間を測って、距離に変換して表示してるんですね。
前回よりは、簡単でよかったです。
 菱餅も無かったし~
菱餅も無かったし~
ハラハラドキドキ!動作確認!!
ハラハラドキドキです。
ボードにUSBケーブルを繋いでノートパソコンに接続、そして、プログラムを開きました。ボードへの書込は、忘れずにこの技↓ですね!!(※ 該当の部分に飛びます)
(※ 後半の「書き始めるまでBOOTボタン押しっぱなし技」です。)


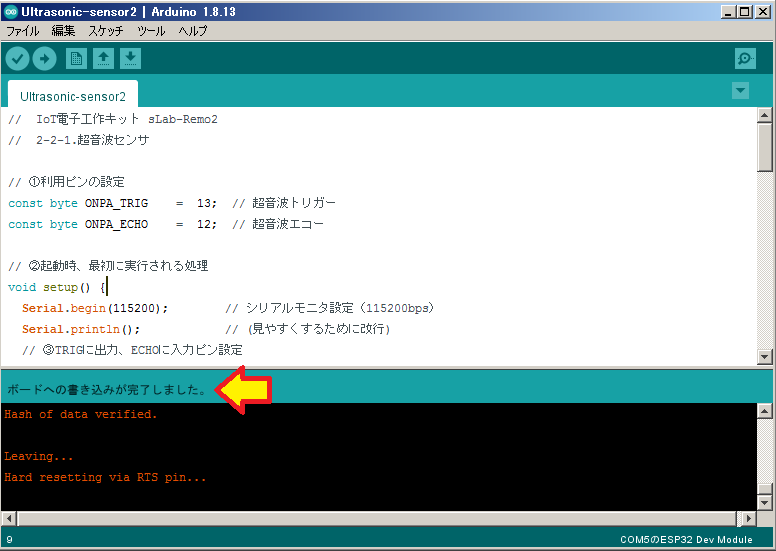
今回は2回目で成功しました・・・指が釣りそうになるんです~!!
さて、どうなるか・・・はい!!
動きました!!
 ※ sLabダンサーズ(仮称)
※ sLabダンサーズ(仮称)
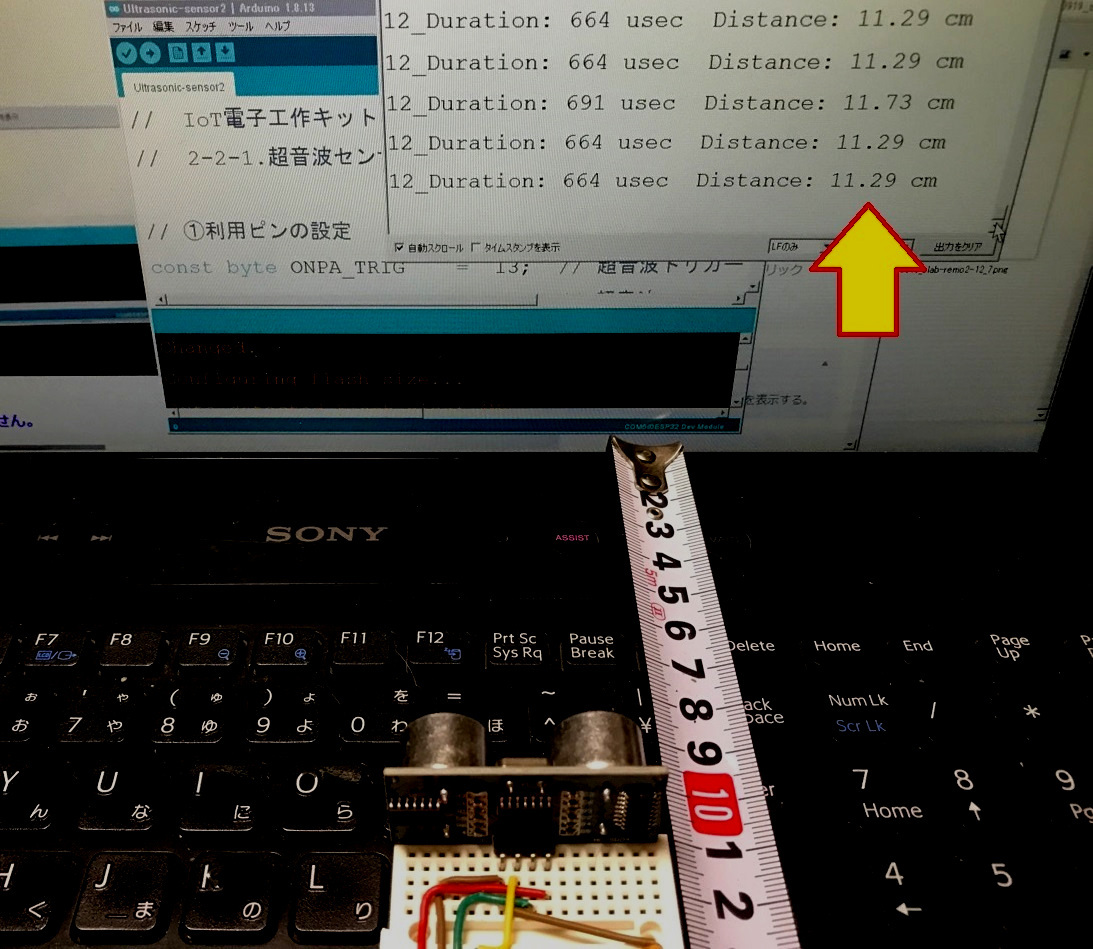
センサー表面から液晶までちょうど10cmのところに配置したのですが、11.29cmとでてますね。
測定レンジは2cmから4mですので問題ありませんが、なにせ対象が光っている液晶画面なので・・・あれ?音波なので関係ない・・・かな?(汗)
実際に測っている部分は円筒の中にあるセンサーでしょうから、本当は11.5cmぐらいが妥当?? そうなると、誤差3%ぐらいですかね!!
そんなハズはないけど、とりあえず喜んでいる図
精度に関しては仕様書にも書かれてないのでヨシとします。
・・・そうそう、天井(約2m)に向けたときは酷かったですね。数10cmは違いました。
基本原理は三角測量なので、2つのセンサー幅を考えると距離が近いほど精度があがるんでしょうね。
まとめ
今回はラクチンでした。
ああ~こうやって超音波センサーって動くんだぁ~と、大変勉強になりました。
 実は深夜のApple Eventの翌日に半分寝ながらやってたのはナイショです。
実は深夜のApple Eventの翌日に半分寝ながらやってたのはナイショです。
次回は【電子部品利用実習⑧編】ですね。
赤外線障害物センサー・・・って、今回のと被るような気がします。

またスマートスピーカーから離れてしまいそうですね。
どうせニュースも少ないからいいか!!(おい)
以上です!!
先週はサボってしまいました。申し訳ありません。
この記事は自分的には結構負荷が重いので、頭が痛いときはやる気になりません・・・いや、なれないんです(泣)
でも、これから先はますます難しくなってくるんでしょうね~
それもハードよりもソフト寄りに・・・
1記事で3日分ぐらいかかりそう・・・
(おわり)