

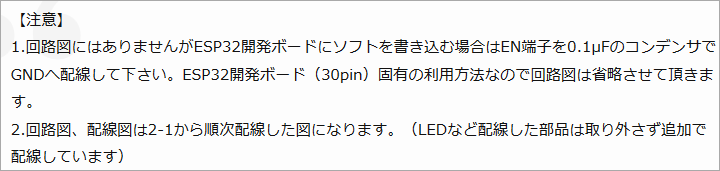
おはようございます!!
先日、こちら↓の記事を書かせていただきました。


スマートリモコンの学習キットの「sLab-Remo2」ですね!!

 キット構成 キット構成 |
 ArduinoIDE ArduinoIDE |
 ESP32と書込 ESP32と書込 |
 スケッチ書込 スケッチ書込 |
 ライブラリ等 ライブラリ等 |
 実習①Lチカ 実習①Lチカ |
 実習②照度センサ 実習②照度センサ |
 実習③温湿度センサ 実習③温湿度センサ |
 実習④人感センサ 実習④人感センサ |
 実習⑤赤外線 実習⑤赤外線リモコン受信 |
 実習⑥赤外線 実習⑥赤外線リモコン送信 |
 実習⑦ 実習⑦超音波センサ |
【電子部品利用実習⑦編】ということで実際に回路を組み、プログラムを転送し、超音波センサの動作確認まで行いました。
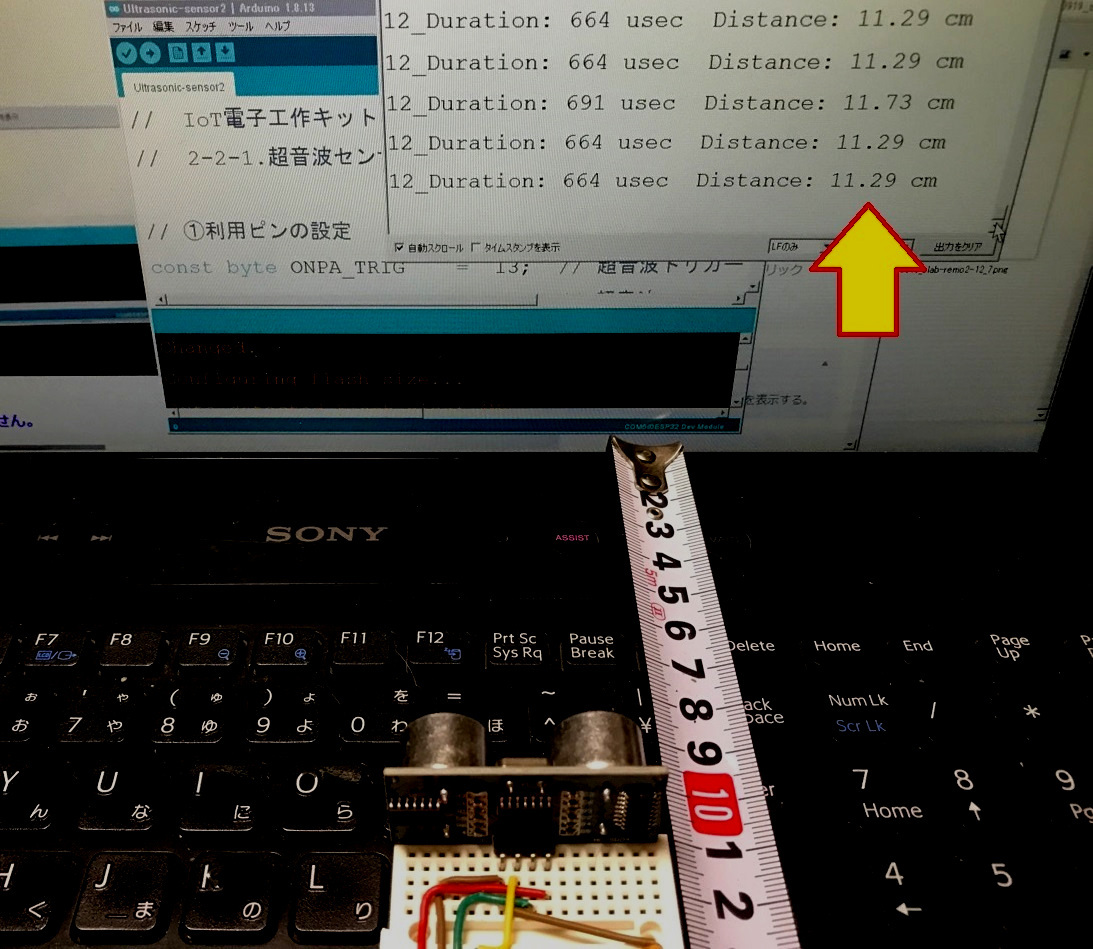
うちの車(※ シートベルトの無い時代の車です(泣))の追突防止用として取り付けたいぐらいです!・・・まだ、距離を表示するだけしかできませんが・・・
・・・で、今回は電子部品利用実習⑧編で赤外線障害物センサを学習しました!!

目次
スマートリモコン「sLab-Remo2」(エスラボリモ2)【Scratch・Arduino対応】環境センサ・カメラ付《IoT電子工作・AI学習・プログラミング》
こちらです!
詳しい話は以前の記事↓へ!!


4,290円でこれだけ遊べたら凄いものです。(・・・と奧さんに言われています)
ちなみに、本キットの心臓部ESP32-DevKitCですが、Amazonさんで1,500円ぐらいで普通に買えますね。

Espressif社純正 ESP-WROOM-32D開発ボード ESP32-DevKitC-32D
壊してしまったら一大事!と思ってましたが・・・昼ごはん1回我慢すれば買えます(泣)
 昼ご飯は1コイン以下ちゃうのん? 見栄はったらあかんよ!!
昼ご飯は1コイン以下ちゃうのん? 見栄はったらあかんよ!!
では、スタートします。

sLab-Remo2【電子部品利用実習⑧編】
公式メニューの電子部品利用に入ります!(こちら)

下にもズラズラ~っと並んでいますが、まずは 環境センサ付きリモコンを作るわけですね!!
【環境センサ付スマートリモコンで利用】
2-1-1.LED点滅
2-1-2.照度センサ
2-1-3.温湿度センサ
2-1-4.人感センサ
2-1-5.赤外線リモコン受信
2-1-6.赤外線リモコン送信
これで本キットの目的はほぼ達成かも?・・・いやいや、もったいないですね。
それから応用としてその他のデバイス紹介と実習。
【電子部品の使い方のみ】
2-2-1.超音波センサ
2-2-2.赤外線障害物センサ
なんとなく、同社のSLab-Carキットに使われる部品のような・・・

sLab-Car(エスラボ・カー)スマートロボットカー【Scratch・Arduino対応】スターターキット《IoT電子工作・AI学習・プログラミング》 (最小)
いやいや、これらの部品もスマートリモコンに応用できるハズ!!です。
最後にカメラ付きスマートリモコン!!
【カメラ付スマートリモコンで利用】
2-3-1.カメラ
これどのように使うのでしょうね?(笑)
カメラで顔を認識して赤外線リモコンで何かを動かすとか??・・・できればいいですね!!
・・・で、本日は電子部品利用実習⑧編として、8番目の赤外線障害物センサをやってみます。
前回と同じく距離を測ることが目的なのですが、使うのは超音波ではなく赤外線なんですね!!
赤外線リモコンの赤外線なのですが、データを送るわけではなく距離を測るんですね。
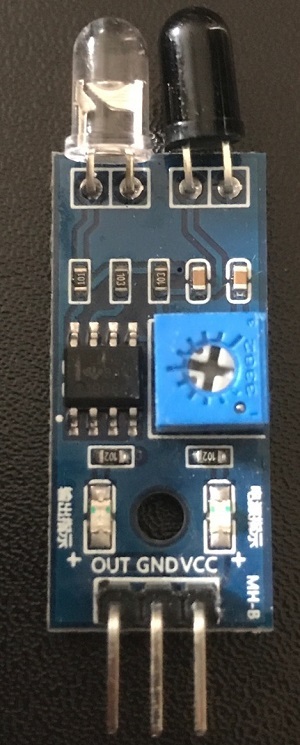
赤外線障害物センサ
こちらですね。

今回も、実際のスマートリモコンには使わないようで番外編として勉強しておきたいと思います。
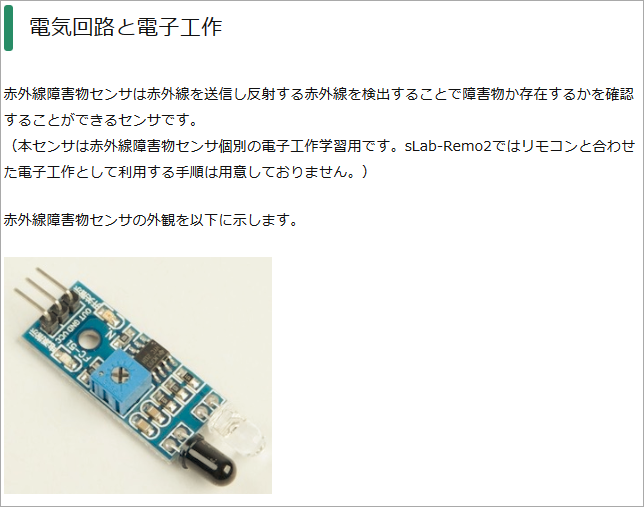
赤外線障害物センサは赤外線を送信し反射する赤外線を検出することで障害物か存在するかを確認することができるセンサです。
前回の超音波センサ
に対して、使う信号が「超音波 → 赤外線」に変わっただけですね。
メリットはなんでしょうね?
小さくなったこと??
間にガラスのような音を反射するようなものが入っていても、光が貫通できるなら測定できること??
基板上にボリウム(可変抵抗)みたいなものが乗っているので、なんらかの調整ができそうですえね!!
 意味?・・・ありません
意味?・・・ありません
電気回路と電子工作
今回使うのは・・・
これ↓と同じもののようです。

特徴:
1.モジュールが前方の障害物の信号を検測する時、基板の上で緑色のパイロットランプは電圧を明るくつけて、
同時にOUTポートは持続的に低い電圧の信号を出力して、このモジュールは2-30cmまで測定して、角度の35度を測定して、
抵抗器を通じて調節することができるまで測定して、時計の針に沿って抵抗器を加減して、増加するまで測定します。
時計の針と逆回りは抵抗器を加減して、減らすまで測定します。
2.センサーの能動的な赤外線は測定に反射して、そのため目標の反射率と形は距離の肝心な点を測定するのです。
その中の黒色は最小だまで測定して、白色が最大だ;小さい面積の物体は小さいまで、大きい面積は大きいです。
3.センサーモジュールがポートOUTを出力するのが直接マクロプロセッサIO口とつながることができる良くて、
直接1つの5V継電器に駆動することができます。接続の方法:VCC-VCCとGND-GNDとOUT-IO。
4.器を比較してLM393を採用して、仕事が安定的です。
5. 3-5V直流の電源を採用してモジュールに対して電力を供給することができます。
電源がつなぐ時、赤色の電源のパイロットランプは明るくつけます。
自動翻訳に頭が痛くなりますね(泣)
どうも前回の超音波センサーとの違いは、距離が数値として返ってくるわけではなく、ボリウムで設定した距離より短いか長いかだけを判定するもののようです。
LM393というのはこの部品の名前ではなく、基板に乗っているコンパレーター(8pinの黒いデバイス)の事ですね。なんという紛らわしい名前なんでしょうね(笑)
(まさか注文したらこのICだけ届くとか(汗))
・・・で、回路図がこちらです!!
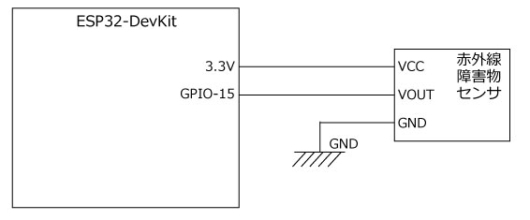
すっきりですね。
ブレッドボードは前回の超音波センサーを乗せたものを使います。
回路図だけでは動かないので、実際に部品を繋いでいく必要があります。
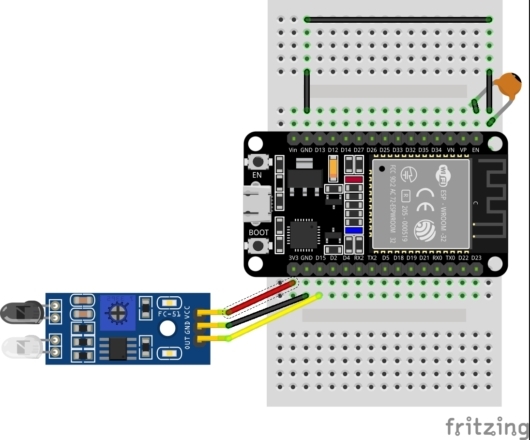
こちらの実装図を確認ですね。
またセンサーが中に浮いてますね。
このままでは扱いづらいので、一旦ボードに差してから配線したいと思います。
先にpinアサインを再確認してみます。(こちらに詳しく書いてます)
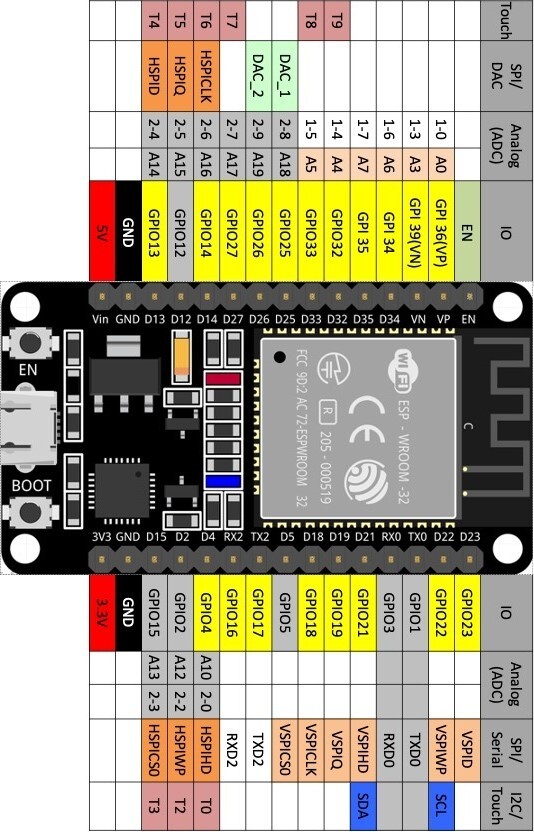
今回は、左下の3つのpinで完結するんですね!(※ リセットの為のEN端子の処理以外)
ちょっとポイントを書いてみます。
- Vin(3.3V)をセンサーの3pin(写真の左下)へ!
- GNDをセンサーの2pin(写真の中央)へ!
- GPIO15をセンサー1pin(写真の右上)へ!!
- 前回から右端のリセット回路は流用!!
リセット回路は既に組んでますがLチカ回路でやったことですね。(こちら)
実験回路の組み立て
部品探しは、赤外線障害物センサだけですね。
 |
 |
袋に1つだけ入ってましたので、すぐに見つかりました!!
信号名も書かれてますので、間違いようもありませんね。
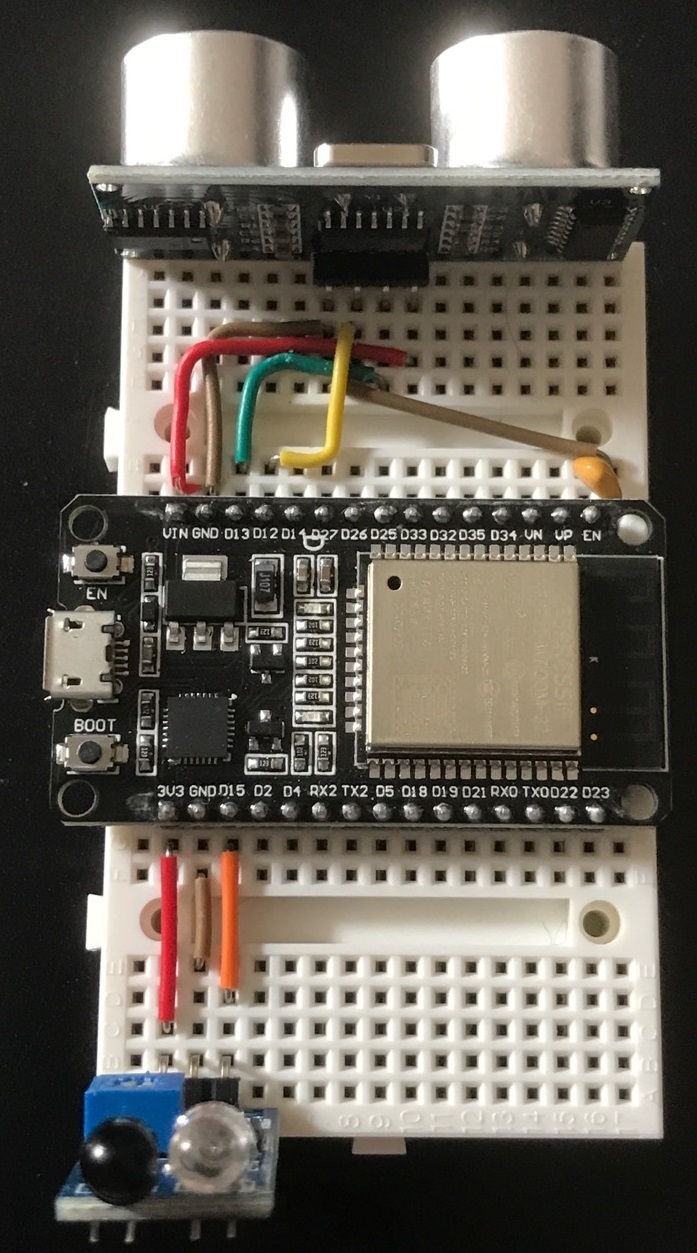
一気に組んでみました!!!
まず、前回のが・・・
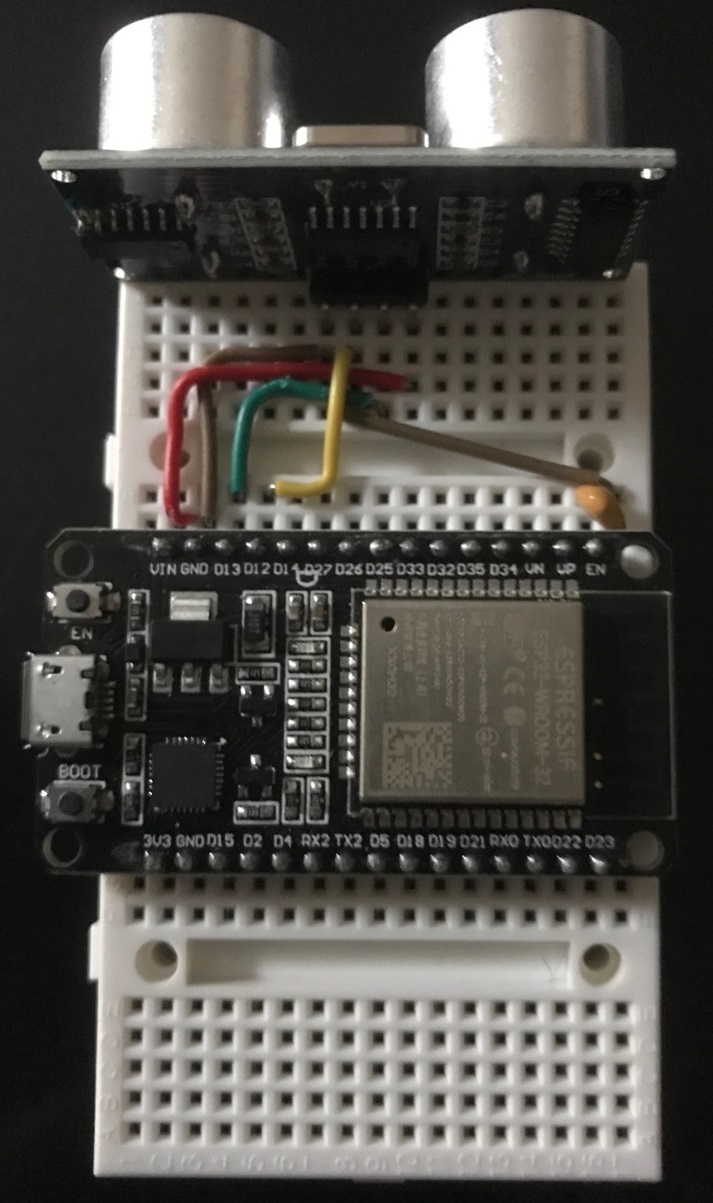
これに組んで・・・完成です・・・配置は最小手順で加工しなくてすむようにしましたので、センサーは上向いてます(笑)
ちょっと拡大してみます。
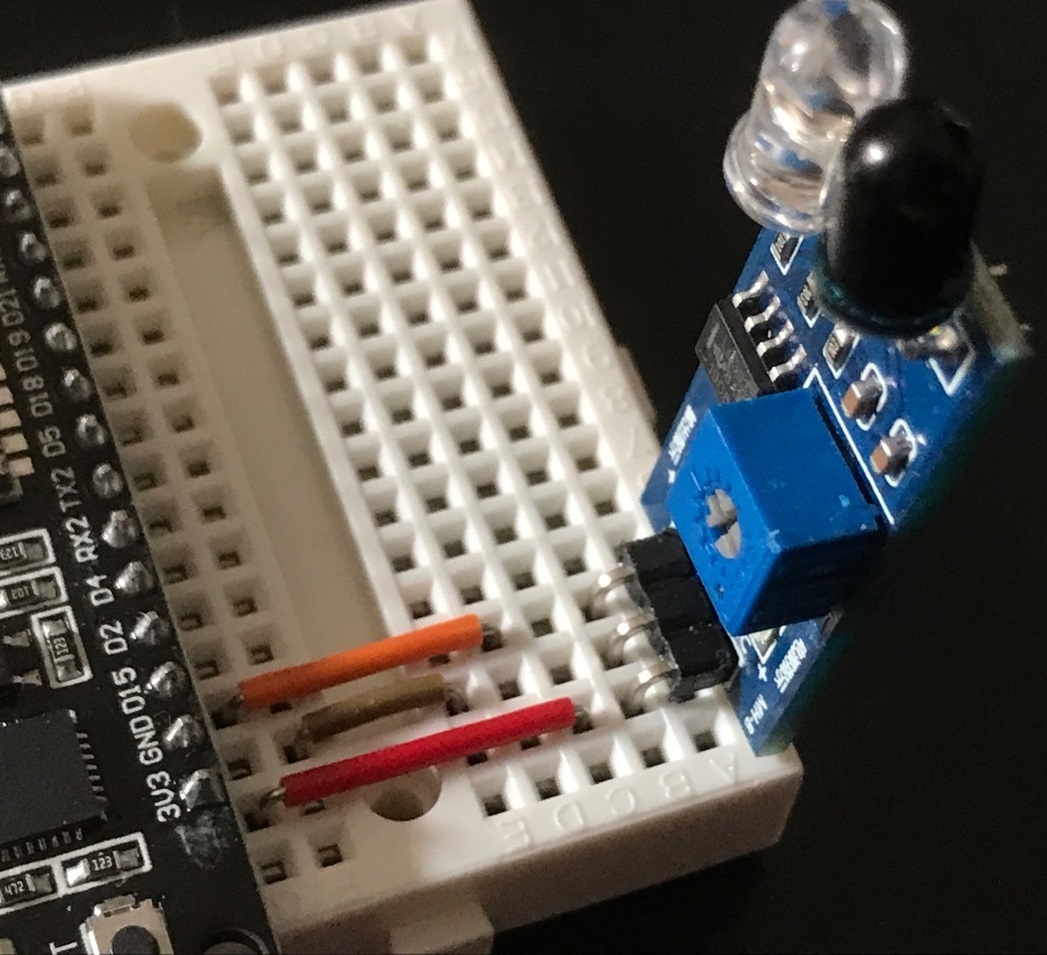 (※ 配線も長さ調整せずに、そのまま差しました)
(※ 配線も長さ調整せずに、そのまま差しました)
過去、いちばん楽だったような・・・
(※ 初回はリセット回路があった分、面倒だったんです)
スケッチ(制御ソフトウェア)
Arduino IDEの登場です!!・・・あ~大変だ。
これでプログラミングしないと回路が動かないわけですね。
スケッチを作成!!
今回も前回作ったArduinoフォルダの中のsLab-Remo2フォルダのUltrasonic-sensorを「Infrared obstacle sensor」と名前をつけて保存してから、サンプルスケッチを貼り付けて保存します。(※ 手順の画像はこれまでと同様なので端折ります)
よしよし!これで動くはず・・・
スケッチの中身
公式に丁寧に解説してありますね。とりあえず貼り付けます。
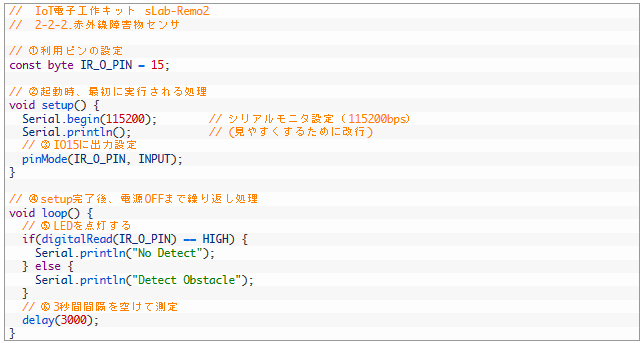
今回は簡単ですね。
DIO15を入力に設定しておいて、デジタル判定によって「”No Detect”」「”Detect Obstacle”」を切り替えてシリアルモニターで表示するだけです。

ハラハラドキドキ!動作確認!!
ハラハラドキドキです。
ボードにUSBケーブルを繋いでノートパソコンに接続、そして、プログラムを開きました。ボードへの書込は、忘れずにこの技↓ですね!!(※ 該当の部分に飛びます)
(※ 後半の「書き始めるまでBOOTボタン押しっぱなし技」です。)


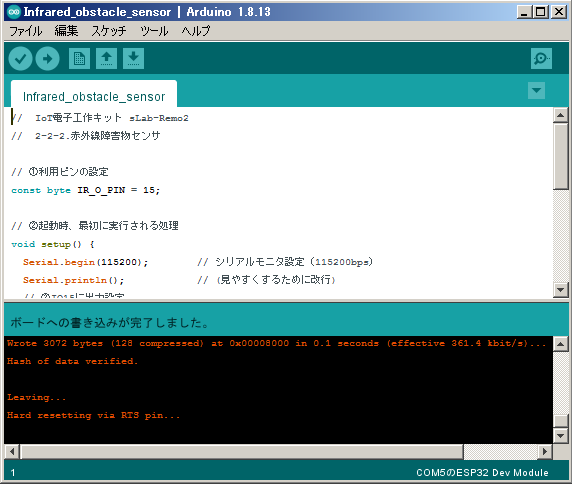
今回は1回で成功しました!
さて、どうなるか・・・はい!!

![]()

動きました!!
 ※ sLabダンサーズ(仮称)
※ sLabダンサーズ(仮称)
手を近づけていくと問題なく検出しました。
(※ 昼ご飯前なので、距離の調整や確認は端折りました)
前回の超音波センサより反応が速いように感じますが、赤外線(光)と超音波(音波)の違いでしょうか?
・・・あ、お腹がなっているので、今は忘れます。
まとめ
今回もラクチンでした。
デバイス的には照度センサに対して判定部品が付いただけ??
 実はもう昼の2時なんです。
実はもう昼の2時なんです。
次回は【電子部品利用実習⑨編】ですね。
・・・え?カメラ??ホントにやるんですか?
 もしかしたら端折るかもしれませんが、とりあえず・・・
もしかしたら端折るかもしれませんが、とりあえず・・・
以上です!!
今回で13回目の記事になりました。
いつも記事を書くときは「1人でも読者がいてくれればOK!!」と思って書いているのですが、さすがにこのシリーズは厳しいですね(汗)
内容的には、この費用で電子部品や電子回路、そしてプログラミングなど勉強できる素晴らしい教材(製品)だと思うのですが、実際に買ってる人って何人いるんでしょうね?
これをきっかけにして、スマートスピーカーの周辺機器を作るコミュニティができれば良いのですが・・・
(おわり)

